6.2 Método de Laplace
El método de Laplace consiste en determinar por
medio de las tres Ai y las tres Di ( i = 1, 2, 3 ) observadas, las coordenadas heliocéntricas ![]() y las componentes de
la velocidad
y las componentes de
la velocidad ![]() del cuerpo en una
época dada (por ejemplo, el momento de la segunda observación) y obtener
después sus elementos orbitales a partir de
del cuerpo en una
época dada (por ejemplo, el momento de la segunda observación) y obtener
después sus elementos orbitales a partir de ![]() y
y ![]() , teniendo en cuenta que se mueve bajo la acción de una
fuerza conocida (atracción solar).
, teniendo en cuenta que se mueve bajo la acción de una
fuerza conocida (atracción solar).
Supongamos realizada una observación ![]() y derivemos dos veces
la relación (1.6) con respecto al tiempo:
y derivemos dos veces
la relación (1.6) con respecto al tiempo:
La Tierra y el cuerpo celeste en cuestión se mueven sujetos a la atracción
gravitatoria del Sol y sus masas pueden despreciarse comparadas con la masa del
Sol. Por consiguiente (Ap. 3.2):
![]() (4.6)
(4.6)
donde m
= GM ( G = constante de la gravitación
universal y M = masa del Sol ).
Sumando miembro a miembro las (4.6) obtenemos:
o lo que es lo mismo:
 (5.6)
(5.6)
Por otra parte, de la Fig.
1.6 obtenemos:
![]() (6.6)
(6.6)
donde y es el ángulo entre los vectores ![]() y
y ![]() .
.
Pues
bien, las fórmulas básicas del método de Laplace son:
 (7.6)
(7.6)
Las ecuaciones (7.6) representan el aspecto geométrico y gravitacional del
movimiento. Contienen el valor ![]() deducido de la
observación en un instante t = t0 y sus derivadas primera y segunda en este mismo
instante que deberemos calcular a partir de
deducido de la
observación en un instante t = t0 y sus derivadas primera y segunda en este mismo
instante que deberemos calcular a partir de ![]() .
.
Designemos con
el subíndice “cero” el valor de ![]() y sus derivadas en el
instante t = t0 .
Desarrollando en serie de Taylor el valor de
y sus derivadas en el
instante t = t0 .
Desarrollando en serie de Taylor el valor de ![]() , tendremos:
, tendremos:
![]() (8.6)
(8.6)
y despreciando los términos con potencias
en t ³ 3, conocida
la observación ![]() en el instante ti ( i = 1, 2, 3 ) pueden obtenerse
en el instante ti ( i = 1, 2, 3 ) pueden obtenerse ![]() ,
, ![]() ,
, ![]() mediante el sistema:
mediante el sistema:
![]() (9.6)
(9.6)
Los valores que se obtienen son sólo
aproximados puesto que hemos truncado la serie en los términos de segundo grado
en t al necesitar sólo derivadas de hasta el segundo orden. Se podrían obtener
valores más aproximados de ![]() y
y ![]() tomando más términos
en la serie (8.6) aunque no se necesiten derivadas de
orden superior al segundo en las ecuaciones (7.6). También
si se dispone de más observaciones, se pueden añadir ecuaciones y proceder a
resolver el sistema por mínimos cuadrados. Pero, como que más tarde habremos de
corregir de aberración, tomaremos, por comodidad, el sistema (9.6)
de tres ecuaciones con tres incógnitas y lo resolveremos algebraicamente. Por
otra parte, es posible escoger t0
de modo que el error sea mínimo, pero se suele tomar t0 de forma que sea el tiempo de la segunda observación.
tomando más términos
en la serie (8.6) aunque no se necesiten derivadas de
orden superior al segundo en las ecuaciones (7.6). También
si se dispone de más observaciones, se pueden añadir ecuaciones y proceder a
resolver el sistema por mínimos cuadrados. Pero, como que más tarde habremos de
corregir de aberración, tomaremos, por comodidad, el sistema (9.6)
de tres ecuaciones con tres incógnitas y lo resolveremos algebraicamente. Por
otra parte, es posible escoger t0
de modo que el error sea mínimo, pero se suele tomar t0 de forma que sea el tiempo de la segunda observación.
Supongamos ahora que hemos encontrado ![]() y
y ![]() . Multipliquemos escalarmente la tercera de (7.6)
primero por
. Multipliquemos escalarmente la tercera de (7.6)
primero por ![]() y después por
y después por![]() . Obtendremos:
. Obtendremos:
![]() (10.6)
(10.6)
y
![]() (11.6)
(11.6)
Tomando la última ecuación de (7.6) y (10.6) formaremos el sistema:
 (12.6)
(12.6)
que resuelto algebraicamente nos dará las
incógnitas r y p.
Es facil ver que la ecuacion que resulta al eliminar una de las incógnitas
en dicho sistema es algebraica de octavo grado en la otra. Para simplificar su
resolución se suele introducir el ángulo auxiliar f formado por los vectores ![]() y
y ![]() (Fig.
1.6) que la reduce a una de cuarto grado. En efecto, en el triángulo PST de dicha figura
1.6 tenemos:
(Fig.
1.6) que la reduce a una de cuarto grado. En efecto, en el triángulo PST de dicha figura
1.6 tenemos:
![]() (13.6)
(13.6)
Escrita la segunda de (12.6)
en la forma
![]() (14.6)
(14.6)
con
 (15.6)
(15.6)
y teniendo en cuenta (13.6),
resulta:
y desarrollando y agrupando términos:
![]() (16.6)
(16.6)
Haciendo para simplificar
 (17.6)
(17.6)
donde el signo de N se toma de modo que M
sea positivo, y sustituyendo en (16.6) se obtiene:
![]() (18.6)
(18.6)
que puede proporcionar a lo sumo dos soluciones f, en cuyo caso la discriminación suele hacerse
tomando alguna nueva observación.
El cálculo de f se efectúa por aproximaciones sucesivas a partir
de un primer valor obtenido gráficamente o por medio de tablas.
La discusión de la ecuación (18.6) puede hallarse en
cualquiera de los textos de Mecánica Celeste que damos en la Bibliografía.
Si sustituimos el valor de f obtenido de (18.6) en (13.6)
obtendremos r y r.
Con r la ecuación (11.6) nos dará ![]() .
.
Hallados r y ![]() las dos
primeras de (7.6) nos darán
las dos
primeras de (7.6) nos darán ![]() y
y ![]() a partir de los cuales
calcularemos los elementos de la órbita.
a partir de los cuales
calcularemos los elementos de la órbita.
6.2.1 Corrección
de aberración
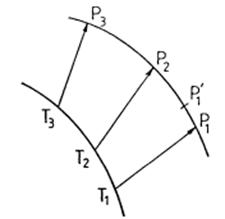
FIG. 2.6
Recordemos que debido a la finitud de la velocidad
de propagación de la luz los astros no se ven desde la Tierra en la posición
que ocupan en el instante de la observación (Ap.
4.2). Por tanto, obtenido un primer valor de r tendremos que corregir de aberración planetaria. Esta corrección afectará
las coordenadas observadas y tendremos que volver a plantear el problema a
partir de (7.6). En la práctica lo que se hace es corregir
los tiempos de las observaciones. Sean Ti
( i = 1, 2, 3) las posiciones del
centro de la Tierra en los instantes ti
de las observaciones. El cuerpo P pasa
por los puntos P1, P2,
P3 (Fig.2.6) no en los tiempos t1, t2, t3 sino
en dichos tiempos disminuidos en el tiempo ti en que la luz tarda en ir de Pi a Ti
( i = 1, 2, 3). Para hacer estas correcciones
a los tiempos de observación es necesario conocer las distancias TiPi = ri ( i
= 1, 2, 3). Teniendo en cuenta que conocemos un primer valor de r y ![]() , podremos escribir con suficiente aproximación
, podremos escribir con suficiente aproximación
![]()
Supongamos
que C representa la velocidad de la
luz. Las épocas en que el cuerpo P
estaba en P1, P2, P3
son:
![]() ( i = 1 ,2,3 )
( i = 1 ,2,3 )
Estas correcciones deben introducirse en el
sistema (9.6) con lo cual obtendremos unos nuevos valores
de ![]() y
y ![]() que nos conducirán a
nuevos valores de r y
que nos conducirán a
nuevos valores de r y ![]() . Si éstos no difieren mucho de los encontrados anteriormente
se podrá seguir el cálculo. Si no, deberemos realizar todavía una nueva
corrección de aberración.
. Si éstos no difieren mucho de los encontrados anteriormente
se podrá seguir el cálculo. Si no, deberemos realizar todavía una nueva
corrección de aberración.
6.2.2
Corrección de los elementos. Método de Leuschner
Aunque efectuemos la corrección de aberración a la
que nos acabamos de referir, una vez calculados los elementos orbitales a
partir de los ![]() y
y ![]() correspondientes a la
época de la segunda observación y calculada una efemérides para las épocas
primera y tercera, encontraremos discrepancias entre observación y cálculo para
dichas épocas. Esto es debido a las aproximaciones que conlleva el método que
estamos empleando. Deberemos pues, corregir los elementos de la órbita.
Leuschner (1902) introdujo, basándose en trabajos realizados anteriormente por
Harzer (1896), un procedimiento para hallar
correspondientes a la
época de la segunda observación y calculada una efemérides para las épocas
primera y tercera, encontraremos discrepancias entre observación y cálculo para
dichas épocas. Esto es debido a las aproximaciones que conlleva el método que
estamos empleando. Deberemos pues, corregir los elementos de la órbita.
Leuschner (1902) introdujo, basándose en trabajos realizados anteriormente por
Harzer (1896), un procedimiento para hallar ![]() ,
, ![]() y
y ![]() ,
, ![]() correspondientes a las
épocas primera y tercera a partir de las
correspondientes a las
épocas primera y tercera a partir de las ![]() y
y ![]() de la
segunda observación, y una vez hallados poder corregir
de la
segunda observación, y una vez hallados poder corregir ![]() ,
, ![]() antes de obtener
los elementos orbitales, lo cual simplifica muchísimo el proceso de cálculo.
antes de obtener
los elementos orbitales, lo cual simplifica muchísimo el proceso de cálculo.
Seguiremos indicando con el índice “cero” todos
los valores correspondientes a la segunda observación. Si ![]() es el vector de
posición en la época t, podemos
expresarlo mediante desarrollo en serie de potencias de t en la forma:
es el vector de
posición en la época t, podemos
expresarlo mediante desarrollo en serie de potencias de t en la forma:
![]() (19.6)
(19.6)
Definamos las cantidades s, t,
w
por
 (20.6)
(20.6)
Derivándolas y utilizando la ecuación del
movimiento
![]() (21.6)
(21.6)
para eliminar ![]() tendremos:
tendremos:
y multiplicando escalarmente por ![]() (21.6)
y dividiendo luego por
(21.6)
y dividiendo luego por ![]() :
:
![]()
con lo que ![]() será:
será:
![]()
Finalmente:
multiplicando ahora por ![]() (21.6)
obtenemos:
(21.6)
obtenemos:
![]()
y por otra parte el segundo término de ![]() es
es
con lo que:
![]()
En resumen, pues, nos quedan las
relaciones:
 (22.6)
(22.6)
Entonces, a partir de la ecuación (21.6) obtendremos,
derivando sucesivamente y teniendo en cuenta (22.6):
Sustituyendo estas expresiones en (19.6) obtendremos, finalmente:
![]() (23.6)
(23.6)
donde:
 (24.6)
(24.6)
Estas series, llamadas simplemente series f y g,
convergen rápidamente para valores pequeños de
t
y nos permiten hallar ![]() conocidos los valores
conocidos los valores ![]() y
y ![]() correspondientes a la
segunda observación.
correspondientes a la
segunda observación.
Para mejorar los
valores ![]() y
y ![]() podemos proceder de la
siguiente forma: Con
podemos proceder de la
siguiente forma: Con ![]() y
y ![]() calcularemos s,
t,
w mediante las fórmulas (20.6).
Sustituidos estos valores en (24.6) haciendo t = t1
y t = t3 obtendremos los pares de valores f1, g1 y
f3, g3, que
sustituidos en (23.6) nos proporcionarán
calcularemos s,
t,
w mediante las fórmulas (20.6).
Sustituidos estos valores en (24.6) haciendo t = t1
y t = t3 obtendremos los pares de valores f1, g1 y
f3, g3, que
sustituidos en (23.6) nos proporcionarán ![]() y
y ![]() .
.
Con ![]() y
y ![]() obtendremos r1 y r3 de las fórmulas
obtendremos r1 y r3 de las fórmulas

y hallados los módulos de ![]() y
y ![]() , podremos calcular:
, podremos calcular:
![]()
Estos ![]() y
y ![]() son
calculados. Nosotros teníamos los vectores
son
calculados. Nosotros teníamos los vectores ![]() proporcionados por la
observación, de modo que si llamamos
proporcionados por la
observación, de modo que si llamamos ![]() a los primeros y
a los primeros y ![]() a los segundos,
tendremos:
a los segundos,
tendremos:
![]()
De aquí que, si llamamos, en general, ![]() a este
a este ![]() será
será
![]()
de donde
![]()
que
podremos escribir para 1 y 3.
De esta forma tendremos unos nuevos valores de ![]() correspondientes a la
primera y tercera observaciones:
correspondientes a la
primera y tercera observaciones:

Por otra parte, si de
 (25.6)
(25.6)
despejamos ![]() y
y ![]() , tendremos:
, tendremos:
 (26.6)
(26.6)
y si en ![]() y
y ![]() en (26.6)
escribimos
en (26.6)
escribimos ![]() y
y ![]() , respectivamente, obtendremos valores más aproximados de
, respectivamente, obtendremos valores más aproximados de ![]() y
y ![]() con los cuales
volveremos a recalcular s, t,
w,
f1, f3, g1, g3, r1, r3,
con los cuales
volveremos a recalcular s, t,
w,
f1, f3, g1, g3, r1, r3, ![]() y
y ![]() , y con el sistema (26.6) obtendremos
nuevos valores, más aproximados,
, y con el sistema (26.6) obtendremos
nuevos valores, más aproximados, ![]() y
y ![]() .
.
Cuando observemos que los últimos valores hallados no difieren
sensiblemente de los anteriores podemos ya proceder a calcular con ellos los
elementos orbitales.
Para la
obtención de los elementos orbitales a partir de ![]() y
y ![]() remitimos al lector al
Apartado 3.11.4.
remitimos al lector al
Apartado 3.11.4.