2.5 Rotación libre
Consideremos
la Tierra como un sólido rígido e introduzcamos dos sistemas de referencia
directos: uno inercial X,Y,Z y otro
solidario a la Tierra x,y,z ambos con
origen en el centro de gravedad de la misma. Interesa estudiar, en los dos
sistemas, la rotación de la Tierra libre de fuerzas exteriores.
Sean:
![]() el momento cinético de la Tierra
respecto al sistema inercial,
el momento cinético de la Tierra
respecto al sistema inercial,
![]() la velocidad angular de la Tierra
respecto al sistema inercial,
la velocidad angular de la Tierra
respecto al sistema inercial,
![]() el momento cinético de la Tierra
respecto al sistema móvil,
el momento cinético de la Tierra
respecto al sistema móvil,
![]() la velocidad angular de la Tierra
respecto al sistema móvil,
la velocidad angular de la Tierra
respecto al sistema móvil,
I el tensor de inercia de la Tierra,
![]() el momento de
las fuerzas exteriores.
el momento de
las fuerzas exteriores.
En
la rotación libre de un cuerpo se considera que, sobre el mismo, no actúan
fuerzas exteriores al sistema, por lo que
![]()
2.5.1 Movimiento respecto
al sistema inercial
En
el sistema inercial se verifica
![]()
derivando esta expresión
respecto al tiempo, teniendo en cuenta que al considerar la Tierra como un
sólido rígido es I = cte., tenemos:
![]() (47.2)
(47.2)
pero en un sistema
inercial (y sólo en un sistema inercial)
![]()
por tanto, en la rotación libre, ![]() . Es decir, el momento
cinético se mantiene constante con respecto al tiempo. Además, según la
expresión (47.2)
. Es decir, el momento
cinético se mantiene constante con respecto al tiempo. Además, según la
expresión (47.2)
![]() (48.2)
(48.2)
que constituye un sistema
homogéneo de tres ecuaciones con tres incógnitas (las componentes de ![]() ), cuya matriz de los coeficientes es I.
Como que el determinante de I no es
nulo, la única solución del sistema (48.2) es la trivial:
), cuya matriz de los coeficientes es I.
Como que el determinante de I no es
nulo, la única solución del sistema (48.2) es la trivial:
![]()
por lo que ![]() también es constante. En conclusión, la velocidad angular de la
Tierra se mantiene constante y su eje de rotación permanece fijo en el espacio.
también es constante. En conclusión, la velocidad angular de la
Tierra se mantiene constante y su eje de rotación permanece fijo en el espacio.
2.5.2 Movimiento respecto al sistema no
inercial
Sabemos
que la relación entre las variaciones respecto al tiempo de un vector genérico ![]() en los ejes inerciales
y en los ejes móviles es:
en los ejes inerciales
y en los ejes móviles es:

por lo que en particular
se verificará:
![]()
Pero,
![]()
y por tanto:
![]()
que es la ecuación
diferencial de la rotación libre llamada ecuación
de Euler.
Sabemos
que si suponemos coincidentes los ejes x,y,z con los ejes principales de
inercia de la Tierra y, además, suponemos que la distribución de masas presenta
simetría de revolución alrededor del eje z (hipótesis muy próxima a la
realidad), el tensor de inercia adopta la forma diagonal
Si
designamos por p,q,r las componentes de ![]() en el sistema móvil,
la ecuación de Euler se escribe:
en el sistema móvil,
la ecuación de Euler se escribe:
O
también:
que equivale al sistema de
ecuaciones diferenciales de primer orden:
 (49.2)
(49.2)
De la última ecuación se
deduce directamente que la componente r de ![]() según el eje z es
invariable.
según el eje z es
invariable.
Si
r es constante, también lo será ![]() y sustituyendo en (49.2) tendremos
y sustituyendo en (49.2) tendremos
![]() (50.2)
(50.2)
Derivando
la primera de las ecuaciones (50.2), obtenemos:
![]()
pero, según la segunda
![]()
por lo que
![]()
cuya solución es
![]()
Pero,
por el teorema de Euler:
![]()
y tomando convenientemente
el origen de tiempos:
![]()
Sustituyendo
en la segunda de las ecuaciones (50.2):
![]()
cuya solución es:
![]()
En
definitiva, la solución del sistema (49.2) es:

por lo que
![]()
es decir, ![]() es de módulo constante.
es de módulo constante.
Por
otra parte, que la componente r según
z de ![]() sea constante
significa que el extremo de
sea constante
significa que el extremo de ![]() se mueve siempre sobre
un plano ortogonal al eje z. Además, el extremo de la proyección sobre el
plano x,y de
se mueve siempre sobre
un plano ortogonal al eje z. Además, el extremo de la proyección sobre el
plano x,y de ![]() , de coordenadas p,q
describe una circunferencia de radio a,
parametrizada en z, con una velocidad
angular m. Se deduce, por tanto,
que
, de coordenadas p,q
describe una circunferencia de radio a,
parametrizada en z, con una velocidad
angular m. Se deduce, por tanto,
que ![]() describe con velocidad angular m, un cono de revolución alrededor del eje z
(tercer eje central de inercia o eje de figura) de semiabertura q constante puesto que como se
puede observar en la figura 12.2
describe con velocidad angular m, un cono de revolución alrededor del eje z
(tercer eje central de inercia o eje de figura) de semiabertura q constante puesto que como se
puede observar en la figura 12.2
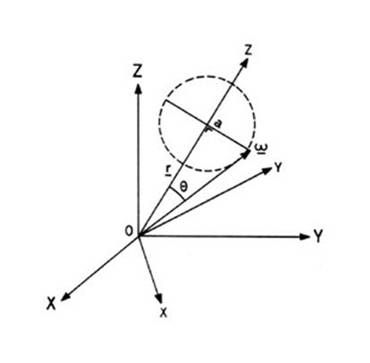
FIG 12.2
![]()
En
suma, el eje instantáneo de rotación describe un cono de revolución alrededor
del eje de figura con un periodo
![]()
Experimentalmente se ha
comprobado que q es del orden de dos décimas de segundo de arco, lo
que implica que ![]() y, por tanto, que
y, por tanto, que ![]() , es decir:
, es decir:
![]()
y dado que
![]()
(realmente es un día
sideral pero la diferencia es despreciable) y del valor teórico
![]()
se deduce
P = 305 días sidéreos
Dicho
periodo teórico, llamado período
euleriano difiere del real observado por Chandler que es de 430 días sidéreos. Newcomb explicó dicha discrepancia suponiendo que la Tierra no era
rígida, por lo que los momentos centrífugos no son nulos (I no es diagonal). En
el cálculo utilizó los módulos de elasticidad (de Young y de Poisson) obtenidos
mediante el estudio de la propagación de las ondas sísmicas. Además, existe
otro movimiento periódico, de periodo un año y semiamplitud de una décima de
segundo de arco, debido a causas meteorológicas. Como que los dos periodos no
son conmensurables, ello motiva que, para un observador terrestre, el polo
instantáneo Pi se desplace dentro de un cuadrado de lado 0"6
(unos 20 metros), centrado en el polo medio Pm (extremo del tercer eje
del elipsoide central de inercia o eje de figura), siguiendo una trayectoria
irregular abierta llamada polodia (Fig. 13.2).
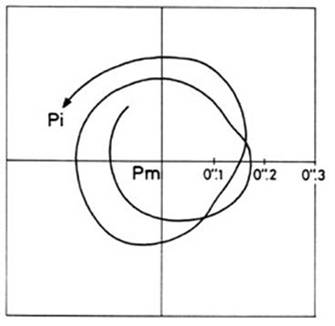
FIG 13.2
2.5.3 Variación de la longitud y de la
latitud instantáneas de un lugar
Debido
al desplazamiento del polo instantáneo variarán las coordenadas instantáneas l,f
de todos los puntos de la Tierra.
El
eje instantáneo de rotación de la Tierra no se mantiene fijo y, por tanto, el
ecuador instantáneo, plano normal a aquél, también variará con el tiempo. Al
medir el ángulo formado por la vertical con el ecuador medio y con el ecuador
instantáneo, se obtiene, respectivamente, la latitud astronómica media fm y
la latitud astronómica instantánea f.
Interesa
conocer las correcciones Df, Dl que deberán aplicarse a
las coordenadas medias fm,lm, que pueden considerarse
constantes, para obtener las instantáneas:

Se
trata ahora de expresar Df y
Dl
en función de la posición del polo instantáneo Pi, sobre la
superficie terrestre. Para ello consideraremos dos sistemas de coordenadas
cartesianas rectangulares, ambos de orientación inversa, x,y,z y x',y',z',
definidos de la siguiente forma: El eje z
dirigido hacia el polo medio; los ejes x
e y sobre el ecuador medio, de tal
modo que el plano zx sea el plano
meridiano de Greenwich; el eje z'
dirigido hacia el polo instantáneo; el eje x'
tomado en la intersección con el ecuador instantáneo del plano determinado por
el eje x y el polo instantáneo; el
eje y' ortogonal a los anteriores (Fig. 14.2).
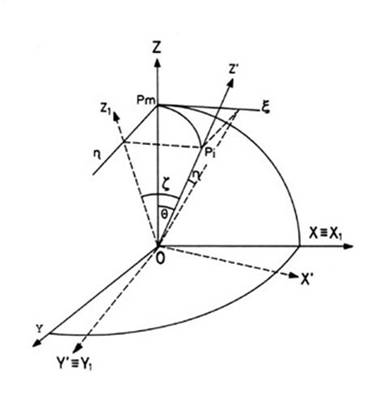
FIG 14.2
Las
coordenadas esféricas de un punto genérico M
situado sobre la superficie terrestre serán (r,fm,lm)
en el primer sistema y (r',f,l)
en el segundo.
Sabemos
que el ángulo q formado por el eje z y el z' es muy pequeño,
por lo que podemos considerar que el polo instantáneo se encuentra en el plano
tangente a la Tierra trazado por el polo medio. Si en dicho plano tangente
introducimos unos ejes de coordenadas x,h,
paralelos, respectivamente, a los ejes x
e y, podremos identificar las
coordenadas (x ,h)
del polo instantáneo en este nuevo sistema con los ángulos que subtienden desde
el centro de la Tierra O.
Para
pasar del triedro x,y,z al x',y',z' es preciso realizar una
rotación de ángulo ‑h alrededor
del eje x (con lo que el eje z pasa a ser zl y el eje y,
yl), seguida de una
rotación de ángulo x
alrededor del eje yl (con
lo cual z1 pasa a
coincidir con el eje de rotación instantánea y el eje x xl pasa a
ocupar la posición x'), es decir:
![]()
que matricialmente,
teniendo en cuenta que la pequeña magnitud de x y
h permite sustituir el seno
por el arco y el coseno por la unidad, se expresa:

al ser x y
h infinitésimos de segundo
orden. Además, podemos escribir:
siendo I la matriz unitaria y  por lo que
por lo que
Recordemos
ahora las fórmulas de la paralaje diurna en coordenadas horarias (2.2.2)
Como
que los sistemas de coordenadas que hemos definido son de orientación inversa,
al igual que el de coordenadas horarias, podemos aplicar dichas fórmulas
directamente haciendo en ellas
![]()
con lo que obtenemos:

relaciones de las que sólo
nos interesan las dos primeras.
Teniendo
en cuenta que
podemos escribir dichas
relaciones de la forma:
![]()
![]()
y, en definitiva:
En
particular, de la segunda fórmula se deduce que la longitud instantánea de
Greenwich no es nula, aunque si muy pequeña, lo que nos autoriza a tomar ![]() ,
, ![]() , y como
, y como ![]() , se tendrá:
, se tendrá:
![]()
de lo cual es una cota
superior
![]()