8.8
Perturbaciones debidas a la acción de varios astros
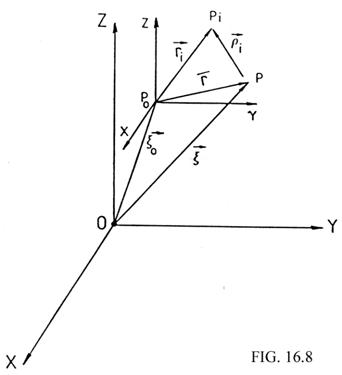
Consideremos n + 2 puntos materiales P0, P, Pi
(i = 1, 2, ...n) de masas respectivas m0, m, mi
(i = 1, 2, ...n) y sean ![]() y
y ![]() los vectores de
posición de P0 y P en un sistema inercial 0; X, Y, Z (Fig.16.8).
Tomemos un sistema de ejes cartesianos con origen en P0 y ejes x, y,
z paralelos a los X, Y, Z, respectivamente. Llamemos
los vectores de
posición de P0 y P en un sistema inercial 0; X, Y, Z (Fig.16.8).
Tomemos un sistema de ejes cartesianos con origen en P0 y ejes x, y,
z paralelos a los X, Y, Z, respectivamente. Llamemos ![]() y
y ![]() a los vectores de
posición de P y Pi con respecto a P0 y
a los vectores de
posición de P y Pi con respecto a P0 y ![]() al vector de posición de Pi con respecto a P. De
acuerdo con la fórmula (32.7) de 7.4, suponiendo m0 = 1 y
refiriendo las otras masas a esta unidad, la ecuación del movimiento de P con
respecto a P0 será
al vector de posición de Pi con respecto a P. De
acuerdo con la fórmula (32.7) de 7.4, suponiendo m0 = 1 y
refiriendo las otras masas a esta unidad, la ecuación del movimiento de P con
respecto a P0 será
en la que el primer término del segundo miembro representa la acción del cuerpo P0 sobre el cuerpo de masa m, el primer término en el paréntesis la acción de los cuerpos de masas mi sobre el de masa m y el segundo término en el paréntesis representa la acción de los cuerpos de masas mi sobre el primario de masa m0 = 1. Evidentemente esta fórmula (73.8) se puede aplicar tanto al estudio del movimiento de un planeta del sistema solar (P0 = Sol) como a un satélite artificial de cualquier planeta o satélite natural.
La parte de (73.8) que depende de mi es la aceleración perturbatriz o fuerza perturbatriz por unidad de masa y es fácil ver que deriva de una función de fuerzas
llamada función pertubatriz.
Podemos obtener la formulación canónica de las ecuaciones del movimiento por consideraciones análogas a las planteadas en 7.1. En efecto, observemos que se verifica


Sustituyendo (75.8) y (76.8) en (73.8) obtenemos:
 (77.8)
(77.8)
Teniendo en cuenta (74.8) y haciendo

nos queda
![]() (78.8)
(78.8)
Introduciendo ahora la función hamiltoniana H definida en (7.1) y operando de manera análoga a como hemos operado allí, tendremos las ecuaciones:
indicando
por ![]() y
y ![]() los gradientes
respecto a las variables
los gradientes
respecto a las variables ![]() y
y ![]() respectivamente. Las
ecuaciones (79.8) son una generalización de las (9.7) y
suelen escribirse también en la forma:
respectivamente. Las
ecuaciones (79.8) son una generalización de las (9.7) y
suelen escribirse también en la forma:

8.8.1
Perturbaciones especiales. Método de Encke
Veamos ahora como podemos integrar numéricamente las ecuaciones (73.8) para intervalos relativamente pequeños. Escribámoslas en la forma
Si las masas mi desapareciesen brúscamente en un instante t, el movimiento sería kepleriano y obedecería a las ecuaciones
siendo ![]() el radio vector de P
respecto a P0 en el instante t0.
el radio vector de P
respecto a P0 en el instante t0.
Supongamos que podemos distinguir entre cuerpo perturbado y cuerpo no perturbado. A partir de la época t0 uno y otro siguen trayectorias distintas; pero, tienen evidentemente las mismas posiciones y las mismas velocidades iniciales
![]()
Supongamos que hemos calculado el valor numérico de las coordenadas ![]() en función del
tiempo y pongamos
en función del
tiempo y pongamos
![]()
De esta forma ponemos en evidencia las perturbaciones de las
coordenadas, o dicho de otra forma, las coordenadas diferenciales ![]() de la posición
perturbada con relación a la posición kepleriana.
de la posición
perturbada con relación a la posición kepleriana.
Continuemos designando por mi las masas de los astros
perturbadores y por ![]() sus coordenadas. Si,
como ocurre normalmente, nos proponemos determinar las perturbaciones ejercidas
sobre un pequeño planeta o sobre un cometa por uno de los grandes planetas cuya
teoría analítica ha sido completamente desarrollada y que no sufre ninguna
perturbación sensible por parte del astro estudiado, es legítimo suponer conocidos
los valores numéricos de las posiciones
sus coordenadas. Si,
como ocurre normalmente, nos proponemos determinar las perturbaciones ejercidas
sobre un pequeño planeta o sobre un cometa por uno de los grandes planetas cuya
teoría analítica ha sido completamente desarrollada y que no sufre ninguna
perturbación sensible por parte del astro estudiado, es legítimo suponer conocidos
los valores numéricos de las posiciones ![]() en función del tiempo.
en función del tiempo.
Las coordenadas ![]() satisfacen la ecuación
(81.8) de modo que
satisfacen la ecuación
(81.8) de modo que

donde
![]()
Si restamos ![]() de los dos
miembros de (83.8), teniendo en cuenta (82.8),
obtendremos:
de los dos
miembros de (83.8), teniendo en cuenta (82.8),
obtendremos:

Las perturbaciones ![]() pueden determinarse
por integración directa de las ecuaciones (84.8). El
término
pueden determinarse
por integración directa de las ecuaciones (84.8). El
término ![]() puede calcularse, para
alguna fase de la integración, a partir de las leyes del movimiento elíptico y
el
puede calcularse, para
alguna fase de la integración, a partir de las leyes del movimiento elíptico y
el ![]() se calculará para cada
fase de la integración extrapolando
se calculará para cada
fase de la integración extrapolando ![]() . Ahora bien, este proceso no es práctico, puesto que
. Ahora bien, este proceso no es práctico, puesto que ![]() es muy pequeño y
es muy pequeño y ![]() con lo cual resulta que
su diferencia, primer término de
con lo cual resulta que
su diferencia, primer término de ![]() , es muy poco significativa. Para salvar esta dificultad
Encke ideó una transformación que dió lugar al llamado método de Encke.
, es muy poco significativa. Para salvar esta dificultad
Encke ideó una transformación que dió lugar al llamado método de Encke.
Se tiene

Hagamos ahora
![]()
de donde
y llamemos
Tendremos:
Si ![]() es tan pequeño en
comparación con
es tan pequeño en
comparación con ![]() que su cuadrado se
puede despreciar, entonces escribiremos (85.8) en la
forma:
que su cuadrado se
puede despreciar, entonces escribiremos (85.8) en la
forma:
función más fácil de calcular que la (85.8).
Si es q ![]() 1 podemos obtener un
valor aproximado de (86.8) desarrollando en serie
1 podemos obtener un
valor aproximado de (86.8) desarrollando en serie
![]() (88.8)
(88.8)
y todavía podemos definir una función
que cuando q
![]() 0 vale f = 3.
0 vale f = 3.
La ecuación (84.8), resulta, con estos cambios:

y es la que
debe integrarse en el método de Encke. La solución comprende seis constantes de
integración que se toman de modo que las coordenadas y las componentes de la
velocidad en una órbita no perturbada (![]() ,
, ![]() ) sean las mismas que las de la órbita perturbada en una
época particular para la cual
) sean las mismas que las de la órbita perturbada en una
época particular para la cual ![]() y
y ![]() son nulos. La fecha en
la que esto ocurre se llama la fecha de osculación.
son nulos. La fecha en
la que esto ocurre se llama la fecha de osculación.
Las ecuaciones (89.8) son rigurosas si q se calcula con la fórmula (85.8). Para iniciar la integración q se calcula con la fórmula (87.8). Las perturbaciones van siendo incrementadas gradualmente y cuando sus cuadrados ya son apreciables entonces se utiliza la fórmula (85.8).
Si limitamos la integración a una época dada t1,
obtendremos ![]() y
y ![]() correspondientes
a dicha época. Con
correspondientes
a dicha época. Con ![]() y
y ![]() podremos
determinar los elementos de una nueva órbita osculatriz siendo t1
la época origen. El proceso se puede seguir hasta conseguir que las
diferencias O – C sean suficientemente pequeñas. De esta forma, la órbita
perturbada se halla dividida en una serie de arcos cada uno de los cuales ha
sido objeto de una operación particular. Decimos que con este proceso hemos rectificado
la órbita.
podremos
determinar los elementos de una nueva órbita osculatriz siendo t1
la época origen. El proceso se puede seguir hasta conseguir que las
diferencias O – C sean suficientemente pequeñas. De esta forma, la órbita
perturbada se halla dividida en una serie de arcos cada uno de los cuales ha
sido objeto de una operación particular. Decimos que con este proceso hemos rectificado
la órbita.
El método de Encke es uno de los métodos que se conocen con el nombre genérico de método de 1as perturbaciones especiales. Se aplica al cálculo de efemérides de pequeños planetas para los cuales no se ha establecido una teoría analítica, al cálculo del movimiento de cometas perturbado por los grandes planetas, etc. Últimamente se ha recurrido al método de las perturbaciones especiales para controlar en ciertos puntos la teoría analítica de algunos planetas, principalmente Marte y Saturno.
8.8.2 Método de variación de las constantes de
Lagrange
Siguiendo a Lagrange consideraremos un sistema algo más general que el
(80.8) de 2k ecuaciones con 2k incógnitas ![]() que escribiremos de la
forma
que escribiremos de la
forma
con ![]() funciones de las 2k
variables y el tiempo.
funciones de las 2k
variables y el tiempo.
Supongamos que las funciones
que dependen del tiempo y de las constantes a1,..., a2k, son las integrales del sistema

que resulta
de (90.8) con .![]()
El método de Lagrange consiste en suponer que las integrales del sistema (90.8) son de la forma (91.8) donde las constantes a1, a2, ... ,a2k se consideran variables con el tiempo. De este modo tendremos:
mientras que si las aj (j = 1, 2,..., 2k) son constantes será:

y por tanto, en este caso, el sistema (92.8) deberá escribirse en la forma:

Sustituyendo (93.8) en (90.8) teniendo en cuenta (95.8) queda:
 (96.8)
(96.8)
y
multiplicando la primera de estas igualdades por ![]() , la segunda por
, la segunda por ![]() y sumando respecto al
índice i obtenemos:
y sumando respecto al
índice i obtenemos:
 (97.8)
(97.8)
ecuaciones de Lagrange que suelen escribirse de la forma
donde
 (99.8)
(99.8)
son los
llamados paréntesis de Lagrange.
Recordemos algunas propiedades de estos paréntesis que nos van a ser útiles:
a) Si ah = aj. el paréntesis es nulo.
b) ![]() para cualquier par de valores de ah y aj.
para cualquier par de valores de ah y aj.
c) ![]() cualesquiera que sean ah y aj.
cualesquiera que sean ah y aj.
d) Un giro del sistema de referencia alrededor de uno cualquiera de los ejes de modo que O; x, y, z → O; x1, y1, z1 transforma el paréntesis de Lagrange de la siguiente forma
donde ![]() y
y ![]() son los transformados
de los vectores
son los transformados
de los vectores ![]() y
y ![]() con este giro, α
es el ángulo de giro y
con este giro, α
es el ángulo de giro y  es el jacobiano de la
transformación.
es el jacobiano de la
transformación.
8.8.3 Aplicación al movimiento planetario
Para aplicar el método de variación de las constantes al movimiento planetario necesitamos algunas expresiones deducidas al estudiar el movimiento elíptico (3.6) y sus derivadas con respecto al tiempo que listamos a continuación:
 (103.8)
(103.8)
De las (100.8) y (101.8) deducimos:
En virtud de la independencia del tiempo de los paréntesis de Lagrange (propiedad c)) podemos calcular el valor de estas derivadas para cualquier instante t. Así, si hacemos t = T (época de paso a por el periastro) y tenemos en cuenta que en el periastro es E = 0, de (102.8) obtenemos:
 (107.8)
(107.8)
de donde se deducen los siguientes valores en el periastro para las derivadas (104.8), (105.8) y (106.8).
Recordemos, por otra parte, los giros que nos permiten pasar del
sistema (P0; x,y,z) al sistema de coordenadas ![]() sobre la
órbita del punto P de masa m (3.11.3 y 3.12). Si llamamos p y q
a dos cualesquiera de los elementos orbitales
sobre la
órbita del punto P de masa m (3.11.3 y 3.12). Si llamamos p y q
a dos cualesquiera de los elementos orbitales ![]() y
aplicamos la propiedad de los paréntesis de Lagrange que hemos designado por
d), el paréntesis [p, q], a causa de estos giros, se irá
transformando en otros [p, q]1, [p, q]2,
[p, q]3 , dados por las expresiones:
y
aplicamos la propiedad de los paréntesis de Lagrange que hemos designado por
d), el paréntesis [p, q], a causa de estos giros, se irá
transformando en otros [p, q]1, [p, q]2,
[p, q]3 , dados por las expresiones:
siendo:
De (109.8) por sustituciones sucesivas se obtiene
siendo, por definición de peréntesis de Lagrange:
Pero, aplicando una conocida propiedad de los jacobianos y teniendo en cuenta las expresiones (108.8) podemos escribir:
y sustituyendo en (110.8) resulta:
Para simplificar la expresión (111.8) se utiliza la variable
![]()
cuya derivada respecto a p es
![]()
![]() (112.8)
(112.8)
El proceso de cálculo que hemos seguido
para llegar a la fórmula (112.8) constituye lo que se
conoce con el nombre de método de Whittaker.
Las ecuaciones de Lagrange (98.8) para un movimiento
orbital perturbado se pueden obtener de manera sencilla sustituyendo los
elementos ah, aj (o p, q)
por cualquiera de los elementos orbitales. Así, cuando utilicemos las variables
![]() los paréntesis de
Lagrange tomarán los valores:
los paréntesis de
Lagrange tomarán los valores:
 (113.8)
(113.8)
siendo nulos todos los restantes. Luego, en este sistema de variables, las ecuaciones (98.8) se escribirán:
 (114.8)
(114.8)
sistema que constituye una de las formas canónicas de las ecuaciones del movimiento planetario.
Si, en lugar de las anteriores, utilizamos las variables ![]() ,
, ![]() ,
, ![]() , llamadas variables de Delaunay, obtendremos:
, llamadas variables de Delaunay, obtendremos:
resultando el sistema
Si en lugar de la función perturbatriz R consideramos la función
![]()